Implements several motor interfaces.
#include <EmulatedControlBoard.hpp>
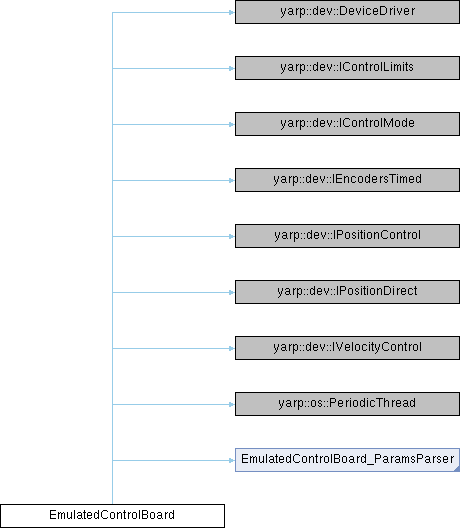
Inheritance diagram for EmulatedControlBoard:
Public Member Functions | |
| bool | getAxes (int *ax) override |
| bool | positionMove (int j, double ref) override |
| bool | positionMove (const double *refs) override |
| bool | relativeMove (int j, double delta) override |
| bool | relativeMove (const double *deltas) override |
| bool | checkMotionDone (int j, bool *flag) override |
| bool | checkMotionDone (bool *flag) override |
| bool | setRefSpeed (int j, double sp) override |
| bool | setRefSpeeds (const double *spds) override |
| bool | setRefAcceleration (int j, double acc) override |
| bool | setRefAccelerations (const double *accs) override |
| bool | getRefSpeed (int j, double *ref) override |
| bool | getRefSpeeds (double *spds) override |
| bool | getRefAcceleration (int j, double *acc) override |
| bool | getRefAccelerations (double *accs) override |
| bool | stop (int j) override |
| bool | stop () override |
| bool | positionMove (int n_joint, const int *joints, const double *refs) override |
| bool | relativeMove (int n_joint, const int *joints, const double *deltas) override |
| bool | checkMotionDone (int n_joint, const int *joints, bool *flags) override |
| bool | setRefSpeeds (int n_joint, const int *joints, const double *spds) override |
| bool | setRefAccelerations (int n_joint, const int *joints, const double *accs) override |
| bool | getRefSpeeds (int n_joint, const int *joints, double *spds) override |
| bool | getRefAccelerations (int n_joint, const int *joints, double *accs) override |
| bool | stop (int n_joint, const int *joints) override |
| bool | getTargetPosition (int joint, double *ref) override |
| bool | getTargetPositions (double *refs) override |
| bool | getTargetPositions (int n_joint, const int *joints, double *refs) override |
| bool | setPosition (int j, double ref) override |
| bool | setPositions (int n_joint, const int *joints, const double *refs) override |
| bool | setPositions (const double *refs) override |
| bool | getRefPosition (int joint, double *ref) override |
| bool | getRefPositions (double *refs) override |
| bool | getRefPositions (int n_joint, const int *joints, double *refs) override |
| bool | resetEncoder (int j) override |
| bool | resetEncoders () override |
| bool | setEncoder (int j, double val) override |
| bool | setEncoders (const double *vals) override |
| bool | getEncoder (int j, double *v) override |
| bool | getEncoders (double *encs) override |
| bool | getEncoderSpeed (int j, double *sp) override |
| bool | getEncoderSpeeds (double *spds) override |
| bool | getEncoderAcceleration (int j, double *spds) override |
| bool | getEncoderAccelerations (double *accs) override |
| bool | getEncodersTimed (double *encs, double *time) override |
| bool | getEncoderTimed (int j, double *encs, double *time) override |
| bool | velocityMove (int j, double sp) override |
| bool | velocityMove (const double *sp) override |
| bool | velocityMove (int n_joint, const int *joints, const double *spds) override |
| bool | getRefVelocity (int joint, double *vel) override |
| bool | getRefVelocities (double *vels) override |
| bool | getRefVelocities (int n_joint, const int *joints, double *vels) override |
| bool | setLimits (int axis, double min, double max) override |
| bool | getLimits (int axis, double *min, double *max) override |
| bool | setVelLimits (int axis, double min, double max) override |
| bool | getVelLimits (int axis, double *min, double *max) override |
| bool | getControlMode (int j, int *mode) override |
| bool | getControlModes (int *modes) override |
| bool | getControlModes (int n_joint, const int *joints, int *modes) override |
| bool | setControlMode (int j, const int mode) override |
| bool | setControlModes (int n_joint, const int *joints, int *modes) override |
| bool | setControlModes (int *modes) override |
| bool | open (yarp::os::Searchable &config) override |
| bool | close () override |
| bool | threadInit () override |
| void | run () override |
 Public Member Functions inherited from EmulatedControlBoard_ParamsParser Public Member Functions inherited from EmulatedControlBoard_ParamsParser | |
| bool | parseParams (const yarp::os::Searchable &config) override |
| std::string | getDeviceClassName () const override |
| std::string | getDeviceName () const override |
| std::string | getDocumentationOfDeviceParams () const override |
| std::vector< std::string > | getListOfParams () const override |
| bool | getParamValue (const std::string ¶mName, std::string ¶mValue) const override |
| std::string | getConfiguration () const override |
Private Types | |
| enum | jmc_state { NOT_CONTROLLING , POSITION_MOVE , RELATIVE_MOVE , VELOCITY_MOVE } |
| enum | jmc_mode { POSITION_MODE , VELOCITY_MODE , POSITION_DIRECT_MODE , UNKNOWN_MODE } |
Private Member Functions | |
| bool | setPositionMode (int j) |
| bool | setVelocityMode (int j) |
| bool | setTorqueMode (int j) |
| bool | setPositionDirectMode (int j) |
Additional Inherited Members | |
| Public Attributes inherited from EmulatedControlBoard_ParamsParser | |
| const std::string | m_device_classname = {"EmulatedControlBoard"} |
| const std::string | m_device_name = {"EmulatedControlBoard"} |
| bool | m_parser_is_strict = false |
| const parser_version_type | m_parser_version = {} |
| std::string | m_provided_configuration |
| const std::string | m_axes_defaultValue = {"5"} |
| const std::string | m_jmcMs_defaultValue = {"20"} |
| const std::string | m_mode_defaultValue = {""} |
| const std::string | m_genInitPos_defaultValue = {"0.0"} |
| const std::string | m_genJointTol_defaultValue = {"0.25"} |
| const std::string | m_genMaxLimit_defaultValue = {"180.0"} |
| const std::string | m_genMinLimit_defaultValue = {"-180.0"} |
| const std::string | m_genRefSpeed_defaultValue = {"7.5"} |
| const std::string | m_genEncRawExposed_defaultValue = {"0.0174532925199433"} |
| const std::string | m_genVelRawExposed_defaultValue = {"0.0174532925199433"} |
| const std::string | m_initPoss_defaultValue = {""} |
| const std::string | m_jointTols_defaultValue = {""} |
| const std::string | m_maxLimits_defaultValue = {""} |
| const std::string | m_minLimits_defaultValue = {""} |
| const std::string | m_refSpeeds_defaultValue = {""} |
| const std::string | m_encRawExposeds_defaultValue = {""} |
| const std::string | m_velRawExposeds_defaultValue = {""} |
| int | m_axes = {5} |
| int | m_jmcMs = {20} |
| std::string | m_mode = {} |
| double | m_genInitPos = {0.0} |
| double | m_genJointTol = {0.25} |
| double | m_genMaxLimit = {180.0} |
| double | m_genMinLimit = {-180.0} |
| double | m_genRefSpeed = {7.5} |
| double | m_genEncRawExposed = {0.0174532925199433} |
| double | m_genVelRawExposed = {0.0174532925199433} |
| std::vector< double > | m_initPoss = {} |
| std::vector< double > | m_jointTols = {} |
| std::vector< double > | m_maxLimits = {} |
| std::vector< double > | m_minLimits = {} |
| std::vector< double > | m_refSpeeds = {} |
| std::vector< double > | m_encRawExposeds = {} |
| std::vector< double > | m_velRawExposeds = {} |
The documentation for this class was generated from the following files:
- libraries/YarpPlugins/EmulatedControlBoard/EmulatedControlBoard.hpp
- libraries/YarpPlugins/EmulatedControlBoard/DeviceDriverImpl.cpp
- libraries/YarpPlugins/EmulatedControlBoard/IControlLimitsImpl.cpp
- libraries/YarpPlugins/EmulatedControlBoard/IControlModeImpl.cpp
- libraries/YarpPlugins/EmulatedControlBoard/IEncodersImpl.cpp
- libraries/YarpPlugins/EmulatedControlBoard/IPositionControlImpl.cpp
- libraries/YarpPlugins/EmulatedControlBoard/IPositionDirectImpl.cpp
- libraries/YarpPlugins/EmulatedControlBoard/IVelocityControlImpl.cpp
- libraries/YarpPlugins/EmulatedControlBoard/PeriodicThreadImpl.cpp
- libraries/YarpPlugins/EmulatedControlBoard/SharedArea.cpp