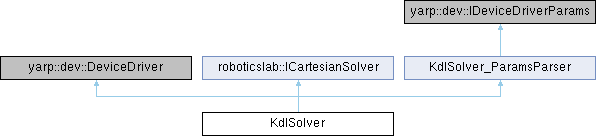
The KdlSolver class implements ICartesianSolver.
#include <KdlSolver.hpp>
Inheritance diagram for KdlSolver:
Public Member Functions | |
| int | getNumJoints () override |
| Get number of joints for which the solver has been configured. | |
| int | getNumTcps () override |
| Get number of TCPs for which the solver has been configured. | |
| bool | appendLink (const std::vector< double > &x) override |
| Append an additional link. | |
| bool | restoreOriginalChain () override |
| Restore original kinematic chain. | |
| bool | changeOrigin (const std::vector< double > &x_old_obj, const std::vector< double > &x_new_old, std::vector< double > &x_new_obj) override |
| Change origin in which a pose is expressed. | |
| bool | fwdKin (const std::vector< double > &q, std::vector< double > &x) override |
| Perform forward kinematics. | |
| bool | poseDiff (const std::vector< double > &xLhs, const std::vector< double > &xRhs, std::vector< double > &xOut) override |
| Obtain difference between supplied pose inputs. | |
| bool | invKin (const std::vector< double > &xd, const std::vector< double > &qGuess, std::vector< double > &q, reference_frame frame) override |
| Perform inverse kinematics. | |
| bool | diffInvKin (const std::vector< double > &q, const std::vector< double > &xdot, std::vector< double > &qdot, reference_frame frame) override |
| Perform differential inverse kinematics. | |
| bool | invDyn (const std::vector< double > &q, std::vector< double > &t) override |
| Perform inverse dynamics. | |
| bool | invDyn (const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< double > &ftip, std::vector< double > &t, reference_frame frame) override |
| Perform inverse dynamics. | |
| bool | open (yarp::os::Searchable &config) override |
| bool | close () override |
 Public Member Functions inherited from roboticslab::ICartesianSolver Public Member Functions inherited from roboticslab::ICartesianSolver | |
| virtual | ~ICartesianSolver ()=default |
| Destructor. | |
| virtual bool | invDyn (const std::vector< double > &q, const std::vector< double > &qdot, const std::vector< double > &qdotdot, const std::vector< std::vector< double > > &fexts, std::vector< double > &t) |
| Perform inverse dynamics. | |
| Public Member Functions inherited from KdlSolver_ParamsParser | |
| bool | parseParams (const yarp::os::Searchable &config) override |
| std::string | getDeviceClassName () const override |
| std::string | getDeviceName () const override |
| std::string | getDocumentationOfDeviceParams () const override |
| std::vector< std::string > | getListOfParams () const override |
| bool | getParamValue (const std::string ¶mName, std::string ¶mValue) const override |
| std::string | getConfiguration () const override |
Private Member Functions | |
| const yarp::os::LogComponent & | logc () const |
Additional Inherited Members | |
| Public Types inherited from roboticslab::ICartesianSolver | |
| enum | reference_frame { BASE_FRAME = yarp::os::createVocab32('c','p','f','b') , TCP_FRAME = yarp::os::createVocab32('c','p','f','t') } |
| Lists supported reference frames. More... | |
| Public Attributes inherited from KdlSolver_ParamsParser | |
| const std::string | m_device_classname = {"KdlSolver"} |
| const std::string | m_device_name = {"KdlSolver"} |
| bool | m_parser_is_strict = false |
| const parser_version_type | m_parser_version = {} |
| std::string | m_provided_configuration |
| const std::string | m_quiet_defaultValue = {"false"} |
| const std::string | m_kinematics_defaultValue = {""} |
| const std::string | m_gravity_defaultValue = {"(0.0 0.0 9.81)"} |
| const std::string | m_ikPos_defaultValue = {"st"} |
| const std::string | m_ikVel_defaultValue = {"pinv"} |
| const std::string | m_epsPos_defaultValue = {"1e-5"} |
| const std::string | m_maxIterPos_defaultValue = {"1000"} |
| const std::string | m_epsVel_defaultValue = {"1e-5"} |
| const std::string | m_maxIterVel_defaultValue = {"150"} |
| const std::string | m_lambda_defaultValue = {"0.01"} |
| const std::string | m_weightsLMA_defaultValue = {"(1.0 1.0 1.0 0.1 0.1 0.1)"} |
| const std::string | m_weightsJS_defaultValue = {""} |
| const std::string | m_weightsTS_defaultValue = {""} |
| const std::string | m_invKinStrategy_defaultValue = {"leastOverallAngularDisplacement"} |
| const std::string | m_mins_defaultValue = {""} |
| const std::string | m_maxs_defaultValue = {""} |
| bool | m_quiet = {false} |
| std::string | m_kinematics = {} |
| std::vector< double > | m_gravity = { } |
| std::string | m_ikPos = {"st"} |
| std::string | m_ikVel = {"pinv"} |
| double | m_epsPos = {1e-5} |
| int | m_maxIterPos = {1000} |
| double | m_epsVel = {1e-5} |
| int | m_maxIterVel = {150} |
| double | m_lambda = {0.01} |
| std::vector< double > | m_weightsLMA = { } |
| std::vector< double > | m_weightsJS = {} |
| std::vector< double > | m_weightsTS = {} |
| std::string | m_invKinStrategy = {"leastOverallAngularDisplacement"} |
| std::vector< double > | m_mins = {} |
| std::vector< double > | m_maxs = {} |
Member Function Documentation
◆ appendLink()
|
overridevirtual |
- Parameters
-
x 6-element vector describing end-effector frame in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians).
- Returns
- true on success, false otherwise
Implements roboticslab::ICartesianSolver.
◆ changeOrigin()
|
overridevirtual |
- Parameters
-
x_old_obj_in 6-element vector describing a pose in cartesian space, expressed in the old frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). x_new_old 6-element vector describing a transformation from the new to the old frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). x_new_obj 6-element vector describing a pose in cartesian space, expressed in the new frame; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians).
- Returns
- true on success, false otherwise
Implements roboticslab::ICartesianSolver.
◆ diffInvKin()
|
overridevirtual |
- Parameters
-
q Vector describing current position in joint space (meters or degrees). xdot 6-element vector describing desired velocity in cartesian space; first three elements denote translational velocity (meters/second), last three denote angular velocity (radians/second). qdot Vector describing target velocity in joint space (meters/second or degrees/second). frame Points at the reference_frame the desired position is expressed in.
- Returns
- true on success, false otherwise
Implements roboticslab::ICartesianSolver.
◆ fwdKin()
|
overridevirtual |
- Parameters
-
q Vector describing a position in joint space (meters or degrees). x 6-element vector describing same position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians).
- Returns
- true on success, false otherwise
Implements roboticslab::ICartesianSolver.
◆ getNumJoints()
|
overridevirtual |
- Returns
- Number of joints.
Implements roboticslab::ICartesianSolver.
◆ getNumTcps()
|
overridevirtual |
- Returns
- The number of TCPs.
Implements roboticslab::ICartesianSolver.
◆ invDyn() [1/2]
|
overridevirtual |
- Parameters
-
q Vector describing current position in joint space (meters or degrees). qdot Vector describing current velocity in joint space (meters/second or degrees/second). qdotdot Vector describing current acceleration in joint space (meters/second² or degrees/second²). ftip Vector describing an external force applied to the robot tip, expressed in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). t 6-element vector describing desired forces in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²). frame Points at the reference_frame ftipis expressed in.
- Returns
- true on success, false otherwise
Implements roboticslab::ICartesianSolver.
◆ invDyn() [2/2]
|
overridevirtual |
Assumes null joint velocities and accelerations, and no external forces.
- Parameters
-
q Vector describing current position in joint space (meters or degrees). t 6-element vector describing desired forces in cartesian space; first three elements denote translational acceleration (meters/second²), last three denote angular acceleration (radians/second²).
- Returns
- true on success, false otherwise
Implements roboticslab::ICartesianSolver.
◆ invKin()
|
overridevirtual |
- Parameters
-
xd 6-element vector describing desired position in cartesian space; first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). qGuess Vector describing current position in joint space (meters or degrees). q Vector describing target position in joint space (meters or degrees). frame Points at the reference_frame the desired position is expressed in.
- Returns
- true on success, false otherwise
Implements roboticslab::ICartesianSolver.
◆ poseDiff()
|
overridevirtual |
The result is an infinitesimal displacement twist, i.e. a vector, for which the operation of addition makes physical sense.
- Parameters
-
xLhs 6-element vector describing a pose in cartesian space (left hand side); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). xRhs 6-element vector describing a pose in cartesian space (right hand side); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians). xOut 6-element vector describing a pose in cartesian space (result); first three elements denote translation (meters), last three denote rotation in scaled axis-angle representation (radians).
- Returns
- true on success, false otherwise
Implements roboticslab::ICartesianSolver.
◆ restoreOriginalChain()
|
overridevirtual |
- Returns
- true on success, false otherwise
Implements roboticslab::ICartesianSolver.
The documentation for this class was generated from the following files:
- libraries/YarpPlugins/KdlSolver/KdlSolver.hpp
- libraries/YarpPlugins/KdlSolver/DeviceDriverImpl.cpp
- libraries/YarpPlugins/KdlSolver/ICartesianSolverImpl.cpp