|
|
| InvalidDevice () |
| | Creates an invalid device.
|
| |
| bool | acquireInterfaces () override |
| | Acquires plugin interfaces.
|
| |
| bool | acquireData () override |
| | Acquires data from remote device.
|
| |
| void | sendMovementCommand (double timestamp) override |
| | Sends movement command to the cartesian controller.
|
| |
| void | stopMotion () override |
| | Sends a movement command that would stop motion.
|
| |
| | StreamingDevice (yarp::os::Searchable &config) |
| | Constructor.
|
| |
|
virtual | ~StreamingDevice () |
| | Destructor.
|
| |
| virtual bool | initialize (bool usingStreamingPreset) |
| | Perform any custom initialization needed. This method is called after the successful creation of the device and once all interface handles are acquired.
|
| |
| virtual bool | transformData (double scaling) |
| | Performs required operations on stored data.
|
| |
| virtual int | getActuatorState () |
| | If actuator command data is available, return its current state.
|
| |
| virtual bool | hasValidMovementData () const |
| | Checks whether the device may forward acquired and processed data to the controller.
|
| |
| void | setCartesianControllerHandle (ICartesianControl *iCartesianControl) |
| | Stores handle to an ICartesianControl instance.
|
| |
A call to isValid() and other interface methods should yield false.
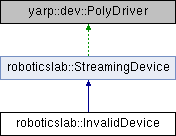
 Public Member Functions inherited from roboticslab::StreamingDevice
Public Member Functions inherited from roboticslab::StreamingDevice