Soft Gripper Demos#
Setup and Calibration#
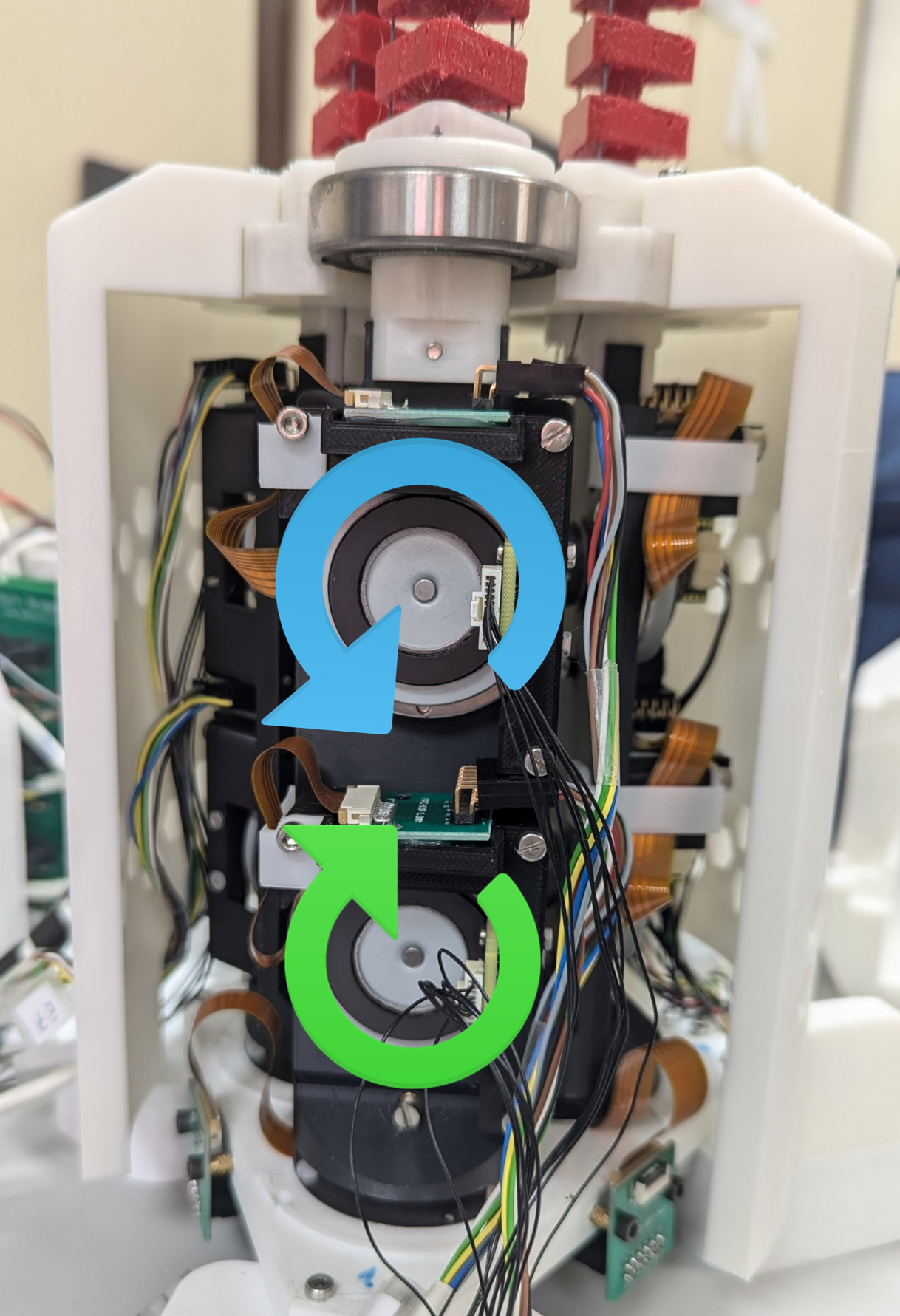
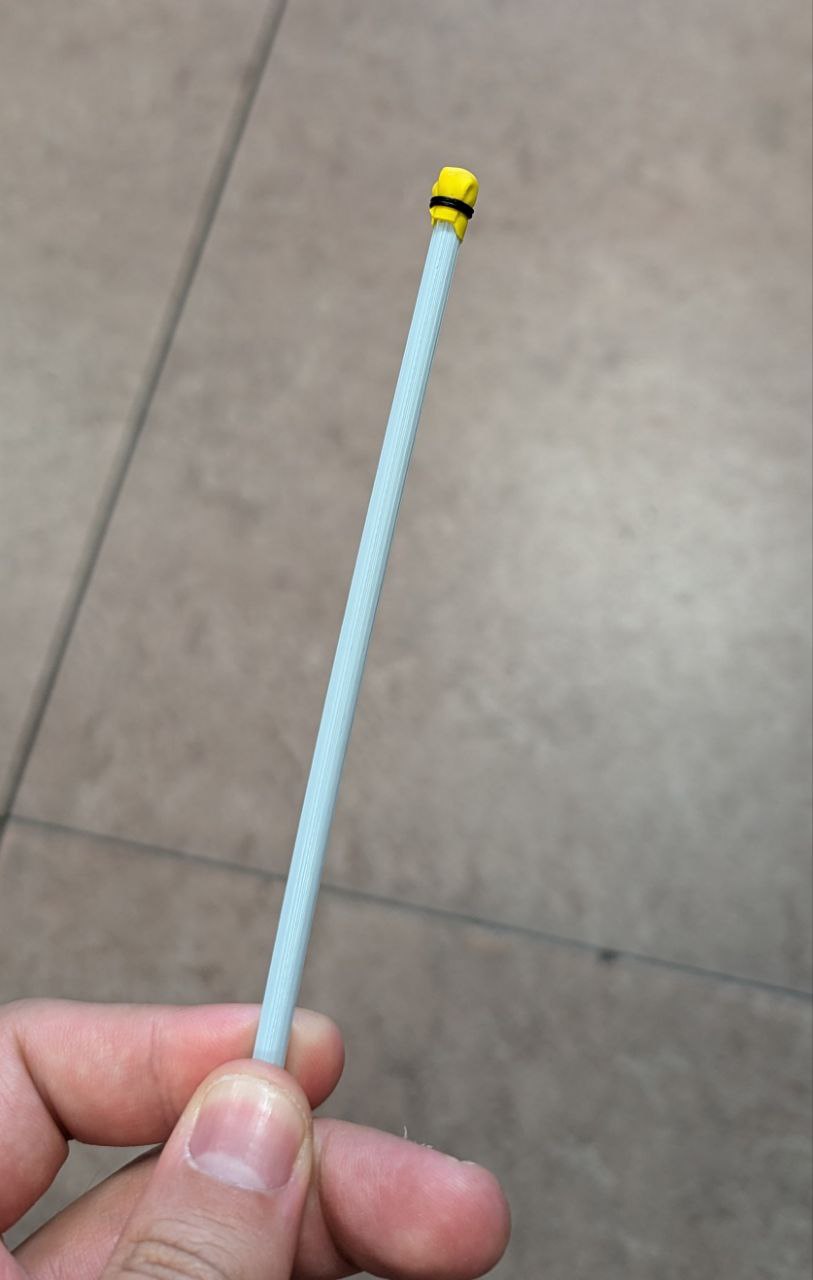
For the demos to work the best the finger's tendons need to be tightened first without the fingers curling excessively. A first approach can be done manually using the blue stick with the yellow head by sticking it through the honeycomb panels and rotating the encoders (black ring) on the desired sense. For tightening the tendons attached to the upper row of motors rotate the encoder counterclockwise. For those in the lower row, rotate clockwise.
-
Launch yarpserver with the following command.
2. Setup the port for CAN communications at a baud rate of 1MHz with the following command.yarpserver --write3. For checking that a communication has been stablished between the PC and the gripper use the candump command in a new terminal.sudo ip link set can0 up txqueuelen 1000 type can bitrate 1000000candump can0 -
Change directory to the required one for launching the can bus application in a new terminal.
cd repos/sofia-yarp-devices/share/contexts/launchCanBus -
Launch the CAN bus application.
YARP_ROBOT_NAME=teoSoftGripper launchCanBus --from softGripper.ini -
At this point you can turn on the Power Supply with a voltage of 24 V and tense the tendons and align the fingers. This is done by means of the remote procedure calls (RPC). The RPC commands can be accessed through the following command:
yarp rpc /teo/softgripper/rpc:i
You can tighten and untighten the tendons with the set pos command, which gives a distance(m) value for the motor to rotate. It is suggested to use increments or decrements of 0.01 as a starting value.
set pos X 0.01
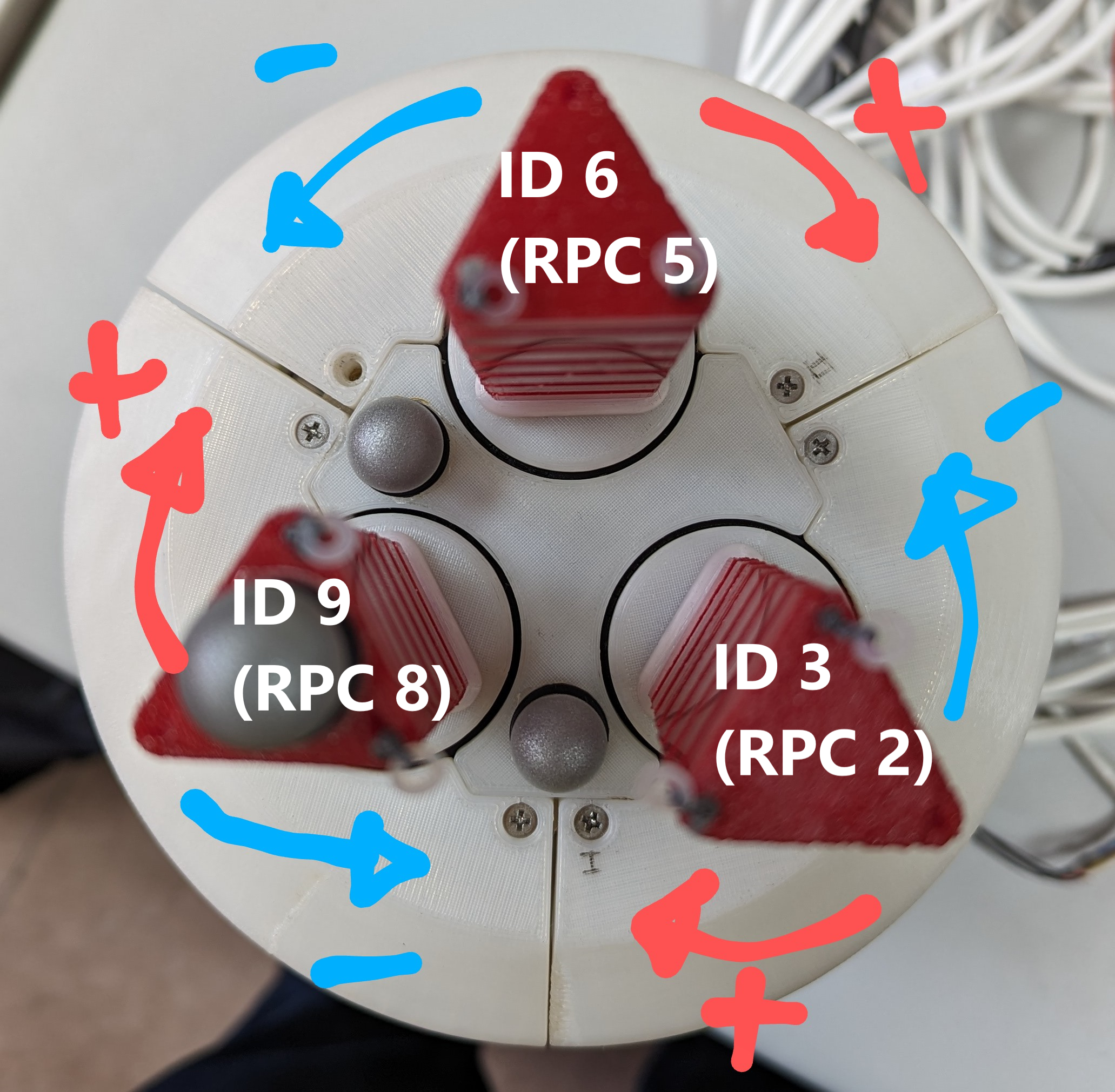
Where X is the Motor ID-1, as it starts with 0 instead of 1. A figure with the IDs and the rotation movements for each of the three base motors, one for each finger:
Demo: Ball Juggling#
A demonstration of the following demo can be seen in the following links: - Soft Gripper Manipulability - Soft Gripper Grasping Experiments
Throughout this section, the required steps to run the Space Navigator demo of the soft neck are described.
- Plug the PCAN-USB adapter to the PC.
- On a terminal, run the following command for setting up the CAN bus port at a baud rate of 1MHz:
ip link set can0 up txqueuelen 1000 type can bitrate 1000000 restart-ms 100
- On the same terminal, launch yarpserver through the following command:
yarpserver --write
yarp rpc /softneck/rpc:i
You can tighten and untighten the tendons with the set pos command, which gives a distance(m) value for the motor to rotate. It is suggested to use increments or decrements of 0.01 as a starting value.
set pos 0 0.01
This will shorten the first tendon a length of 0.01m. The ID associated to each motor is shown in the following figure.