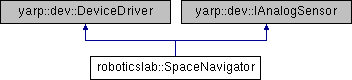
Implementation for the SpaceNavigator 3D mouse.
More...
#include <SpaceNavigator.hpp>
|
|
double | dx {0.0} |
| |
|
double | dy {0.0} |
| |
|
double | dz {0.0} |
| |
|
double | droll {0.0} |
| |
|
double | dpitch {0.0} |
| |
|
double | dyaw {0.0} |
| |
|
int | button1 {0} |
| |
|
int | button2 {0} |
| |
|
unsigned int | noDataCounter {0} |
| |
|
double | deadband {0.0} |
| |
Launch as in:
yarpdev --device SpaceNavigator --period 5 --name /spacenavigator
You can split mouse and button output into separate channels with:
yarpdev --device SpaceNavigator --period 5 --name /spacenavigator --ports "(mouse:o buttons:o)" --channels 8 --mouse:o 0 5 0 5 --buttons:o 6 7 0 1
◆ calibrateChannel() [1/2]
| int SpaceNavigator::calibrateChannel |
( |
int |
ch | ) |
|
|
override |
Calibrates one single channel.
- Parameters
-
- Returns
- status.
◆ calibrateChannel() [2/2]
| int SpaceNavigator::calibrateChannel |
( |
int |
ch, |
|
|
double |
value |
|
) |
| |
|
override |
Calibrates one single channel, using a calibration value.
- Parameters
-
| ch | channel number. |
| value | calibration value. |
- Returns
- status.
◆ calibrateSensor() [1/2]
| int SpaceNavigator::calibrateSensor |
( |
| ) |
|
|
override |
Calibrates the whole sensor.
- Returns
- status.
◆ calibrateSensor() [2/2]
| int SpaceNavigator::calibrateSensor |
( |
const yarp::sig::Vector & |
value | ) |
|
|
override |
Calibrates the whole sensor, using an vector of calibration values.
- Parameters
-
| value | a vector of calibration values. |
- Returns
- status.
◆ getChannels()
| int SpaceNavigator::getChannels |
( |
| ) |
|
|
override |
Get the number of channels of the sensor.
- Returns
- number of channels (0 in case of errors).
◆ getState()
| int SpaceNavigator::getState |
( |
int |
ch | ) |
|
|
override |
Check the state value of a given channel.
- Parameters
-
- Returns
- status.
◆ read()
| int SpaceNavigator::read |
( |
yarp::sig::Vector & |
out | ) |
|
|
override |
Read a vector from the sensor.
- Parameters
-
| out | a vector containing the sensor's last readings. |
- Returns
- AS_OK or return code. AS_TIMEOUT if the sensor timed-out.
The documentation for this class was generated from the following files:
- libraries/YarpPlugins/SpaceNavigator/SpaceNavigator.hpp
- libraries/YarpPlugins/SpaceNavigator/DeviceDriverImpl.cpp
- libraries/YarpPlugins/SpaceNavigator/IAnalogSensorImpl.cpp