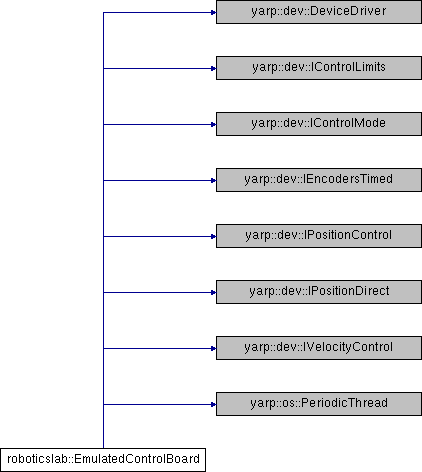
Implements several motor interfaces.
|
|
bool | getAxes (int *ax) override |
| |
|
bool | positionMove (int j, double ref) override |
| |
|
bool | positionMove (const double *refs) override |
| |
|
bool | relativeMove (int j, double delta) override |
| |
|
bool | relativeMove (const double *deltas) override |
| |
|
bool | checkMotionDone (int j, bool *flag) override |
| |
|
bool | checkMotionDone (bool *flag) override |
| |
|
bool | setRefSpeed (int j, double sp) override |
| |
|
bool | setRefSpeeds (const double *spds) override |
| |
|
bool | setRefAcceleration (int j, double acc) override |
| |
|
bool | setRefAccelerations (const double *accs) override |
| |
|
bool | getRefSpeed (int j, double *ref) override |
| |
|
bool | getRefSpeeds (double *spds) override |
| |
|
bool | getRefAcceleration (int j, double *acc) override |
| |
|
bool | getRefAccelerations (double *accs) override |
| |
|
bool | stop (int j) override |
| |
|
bool | stop () override |
| |
|
bool | positionMove (int n_joint, const int *joints, const double *refs) override |
| |
|
bool | relativeMove (int n_joint, const int *joints, const double *deltas) override |
| |
|
bool | checkMotionDone (int n_joint, const int *joints, bool *flags) override |
| |
|
bool | setRefSpeeds (int n_joint, const int *joints, const double *spds) override |
| |
|
bool | setRefAccelerations (int n_joint, const int *joints, const double *accs) override |
| |
|
bool | getRefSpeeds (int n_joint, const int *joints, double *spds) override |
| |
|
bool | getRefAccelerations (int n_joint, const int *joints, double *accs) override |
| |
|
bool | stop (int n_joint, const int *joints) override |
| |
|
bool | getTargetPosition (int joint, double *ref) override |
| |
|
bool | getTargetPositions (double *refs) override |
| |
|
bool | getTargetPositions (int n_joint, const int *joints, double *refs) override |
| |
|
bool | setPosition (int j, double ref) override |
| |
|
bool | setPositions (int n_joint, const int *joints, const double *refs) override |
| |
|
bool | setPositions (const double *refs) override |
| |
|
bool | getRefPosition (int joint, double *ref) override |
| |
|
bool | getRefPositions (double *refs) override |
| |
|
bool | getRefPositions (int n_joint, const int *joints, double *refs) override |
| |
|
bool | resetEncoder (int j) override |
| |
|
bool | resetEncoders () override |
| |
|
bool | setEncoder (int j, double val) override |
| |
|
bool | setEncoders (const double *vals) override |
| |
|
bool | getEncoder (int j, double *v) override |
| |
|
bool | getEncoders (double *encs) override |
| |
|
bool | getEncoderSpeed (int j, double *sp) override |
| |
|
bool | getEncoderSpeeds (double *spds) override |
| |
|
bool | getEncoderAcceleration (int j, double *spds) override |
| |
|
bool | getEncoderAccelerations (double *accs) override |
| |
|
bool | getEncodersTimed (double *encs, double *time) override |
| |
|
bool | getEncoderTimed (int j, double *encs, double *time) override |
| |
|
bool | velocityMove (int j, double sp) override |
| |
|
bool | velocityMove (const double *sp) override |
| |
|
bool | velocityMove (int n_joint, const int *joints, const double *spds) override |
| |
|
bool | getRefVelocity (int joint, double *vel) override |
| |
|
bool | getRefVelocities (double *vels) override |
| |
|
bool | getRefVelocities (int n_joint, const int *joints, double *vels) override |
| |
|
bool | setLimits (int axis, double min, double max) override |
| |
|
bool | getLimits (int axis, double *min, double *max) override |
| |
|
bool | setVelLimits (int axis, double min, double max) override |
| |
|
bool | getVelLimits (int axis, double *min, double *max) override |
| |
|
bool | getControlMode (int j, int *mode) override |
| |
|
bool | getControlModes (int *modes) override |
| |
|
bool | getControlModes (int n_joint, const int *joints, int *modes) override |
| |
|
bool | setControlMode (int j, const int mode) override |
| |
|
bool | setControlModes (int n_joint, const int *joints, int *modes) override |
| |
|
bool | setControlModes (int *modes) override |
| |
|
bool | open (yarp::os::Searchable &config) override |
| |
|
bool | close () override |
| |
|
bool | threadInit () override |
| |
|
void | run () override |
| |
|
void | setEncRaw (const int index, const double position) |
| |
|
void | setEncsRaw (const std::vector< double > &positions) |
| |
|
double | getEncRaw (const int index) |
| |
|
std::vector< double > | getEncsRaw () |
| |
|
double | getEncExposed (const int index) |
| |
|
std::vector< double > | getEncsExposed () |
| |