CAN-oriented control board that implements all YARP motor interfaces. More...
#include <CanBusBroker.hpp>
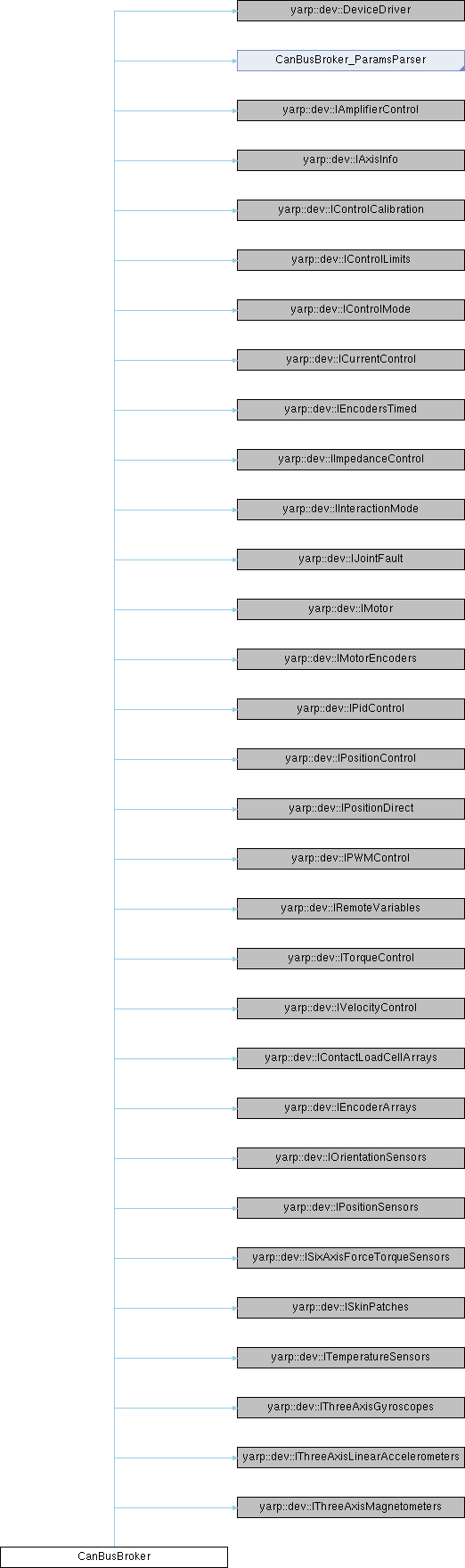
Inheritance diagram for CanBusBroker:
Public Member Functions | |
| bool | open (yarp::os::Searchable &config) override |
| bool | close () override |
| bool | enableAmp (int j) override |
| bool | disableAmp (int j) override |
| bool | getAmpStatus (int j, int *v) override |
| bool | getAmpStatus (int *st) override |
| bool | getMaxCurrent (int j, double *v) override |
| bool | setMaxCurrent (int j, double v) override |
| bool | getNominalCurrent (int m, double *val) override |
| bool | setNominalCurrent (int m, double val) override |
| bool | getPeakCurrent (int m, double *val) override |
| bool | setPeakCurrent (int m, double val) override |
| bool | getPWM (int j, double *val) override |
| bool | getPWMLimit (int j, double *val) override |
| bool | setPWMLimit (int j, double val) override |
| bool | getPowerSupplyVoltage (int j, double *val) override |
| bool | getAxisName (int axis, std::string &name) override |
| bool | getJointType (int axis, yarp::dev::JointTypeEnum &type) override |
| bool | calibrateAxisWithParams (int axis, unsigned int type, double p1, double p2, double p3) override |
| bool | setCalibrationParameters (int axis, const yarp::dev::CalibrationParameters ¶ms) override |
| bool | calibrationDone (int j) override |
| bool | setLimits (int axis, double min, double max) override |
| bool | getLimits (int axis, double *min, double *max) override |
| bool | setVelLimits (int axis, double min, double max) override |
| bool | getVelLimits (int axis, double *min, double *max) override |
| bool | getControlMode (int j, int *mode) override |
| bool | getControlModes (int *modes) override |
| bool | getControlModes (int n_joint, const int *joints, int *modes) override |
| bool | setControlMode (int j, const int mode) override |
| bool | setControlModes (int n_joint, const int *joints, int *modes) override |
| bool | setControlModes (int *modes) override |
| bool | getCurrent (int m, double *curr) override |
| bool | getCurrents (double *currs) override |
| bool | getCurrentRange (int m, double *min, double *max) override |
| bool | getCurrentRanges (double *mins, double *maxs) override |
| bool | setRefCurrent (int m, double curr) override |
| bool | setRefCurrents (const double *currs) override |
| bool | setRefCurrents (int n_motor, const int *motors, const double *currs) override |
| bool | getRefCurrent (int m, double *curr) override |
| bool | getRefCurrents (double *currs) override |
| bool | getAxes (int *ax) override |
| bool | resetEncoder (int j) override |
| bool | resetEncoders () override |
| bool | setEncoder (int j, double val) override |
| bool | setEncoders (const double *vals) override |
| bool | getEncoder (int j, double *v) override |
| bool | getEncoders (double *encs) override |
| bool | getEncoderSpeed (int j, double *spd) override |
| bool | getEncoderSpeeds (double *spds) override |
| bool | getEncoderAcceleration (int j, double *spds) override |
| bool | getEncoderAccelerations (double *accs) override |
| bool | getEncoderTimed (int j, double *encs, double *time) override |
| bool | getEncodersTimed (double *encs, double *times) override |
| bool | getImpedance (int j, double *stiffness, double *damping) override |
| bool | setImpedance (int j, double stiffness, double damping) override |
| bool | setImpedanceOffset (int j, double offset) override |
| bool | getImpedanceOffset (int j, double *offset) override |
| bool | getCurrentImpedanceLimit (int j, double *min_stiff, double *max_stiff, double *min_damp, double *max_damp) override |
| bool | getInteractionMode (int axis, yarp::dev::InteractionModeEnum *mode) override |
| bool | getInteractionModes (yarp::dev::InteractionModeEnum *modes) override |
| bool | getInteractionModes (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| bool | setInteractionMode (int axis, yarp::dev::InteractionModeEnum mode) override |
| bool | setInteractionModes (yarp::dev::InteractionModeEnum *modes) override |
| bool | setInteractionModes (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| bool | getLastJointFault (int j, int &fault, std::string &message) override |
| bool | getNumberOfMotors (int *num) override |
| bool | getTemperature (int m, double *val) override |
| bool | getTemperatures (double *vals) override |
| bool | getTemperatureLimit (int m, double *temp) override |
| bool | setTemperatureLimit (int m, double temp) override |
| bool | getGearboxRatio (int m, double *val) override |
| bool | setGearboxRatio (int m, double val) override |
| bool | getNumberOfMotorEncoders (int *num) override |
| bool | resetMotorEncoder (int m) override |
| bool | resetMotorEncoders () override |
| bool | setMotorEncoderCountsPerRevolution (int m, double cpr) override |
| bool | getMotorEncoderCountsPerRevolution (int m, double *cpr) override |
| bool | setMotorEncoder (int m, double val) override |
| bool | setMotorEncoders (const double *vals) override |
| bool | getMotorEncoder (int m, double *v) override |
| bool | getMotorEncoders (double *encs) override |
| bool | getMotorEncoderTimed (int m, double *enc, double *stamp) override |
| bool | getMotorEncodersTimed (double *encs, double *stamps) override |
| bool | getMotorEncoderSpeed (int m, double *sp) override |
| bool | getMotorEncoderSpeeds (double *spds) override |
| bool | getMotorEncoderAcceleration (int m, double *acc) override |
| bool | getMotorEncoderAccelerations (double *accs) override |
| bool | setPid (const yarp::dev::PidControlTypeEnum &pidtype, int j, const yarp::dev::Pid &pid) override |
| bool | setPids (const yarp::dev::PidControlTypeEnum &pidtype, const yarp::dev::Pid *pids) override |
| bool | setPidReference (const yarp::dev::PidControlTypeEnum &pidtype, int j, double ref) override |
| bool | setPidReferences (const yarp::dev::PidControlTypeEnum &pidtype, const double *refs) override |
| bool | setPidErrorLimit (const yarp::dev::PidControlTypeEnum &pidtype, int j, double limit) override |
| bool | setPidErrorLimits (const yarp::dev::PidControlTypeEnum &pidtype, const double *limits) override |
| bool | getPidError (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *err) override |
| bool | getPidErrors (const yarp::dev::PidControlTypeEnum &pidtype, double *errs) override |
| bool | getPidOutput (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *out) override |
| bool | getPidOutputs (const yarp::dev::PidControlTypeEnum &pidtype, double *outs) override |
| bool | getPid (const yarp::dev::PidControlTypeEnum &pidtype, int j, yarp::dev::Pid *pid) override |
| bool | getPids (const yarp::dev::PidControlTypeEnum &pidtype, yarp::dev::Pid *pids) override |
| bool | getPidReference (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *ref) override |
| bool | getPidReferences (const yarp::dev::PidControlTypeEnum &pidtype, double *refs) override |
| bool | getPidErrorLimit (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *limit) override |
| bool | getPidErrorLimits (const yarp::dev::PidControlTypeEnum &pidtype, double *limits) override |
| bool | resetPid (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| bool | disablePid (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| bool | enablePid (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| bool | setPidOffset (const yarp::dev::PidControlTypeEnum &pidtype, int j, double v) override |
| bool | isPidEnabled (const yarp::dev::PidControlTypeEnum &pidtype, int j, bool *enabled) override |
| bool | positionMove (int j, double ref) override |
| bool | positionMove (const double *refs) override |
| bool | positionMove (int n_joint, const int *joints, const double *refs) override |
| bool | relativeMove (int j, double delta) override |
| bool | relativeMove (const double *deltas) override |
| bool | relativeMove (int n_joint, const int *joints, const double *deltas) override |
| bool | checkMotionDone (int j, bool *flag) override |
| bool | checkMotionDone (bool *flag) override |
| bool | checkMotionDone (int n_joint, const int *joints, bool *flag) override |
| bool | setRefSpeed (int j, double sp) override |
| bool | setRefSpeeds (const double *spds) override |
| bool | setRefSpeeds (int n_joint, const int *joints, const double *spds) override |
| bool | setRefAcceleration (int j, double acc) override |
| bool | setRefAccelerations (const double *accs) override |
| bool | setRefAccelerations (int n_joint, const int *joints, const double *accs) override |
| bool | getRefSpeed (int j, double *spd) override |
| bool | getRefSpeeds (double *spds) override |
| bool | getRefSpeeds (int n_joint, const int *joints, double *spds) override |
| bool | getRefAcceleration (int j, double *acc) override |
| bool | getRefAccelerations (double *accs) override |
| bool | getRefAccelerations (int n_joint, const int *joints, double *accs) override |
| bool | stop (int j) override |
| bool | stop () override |
| bool | stop (int n_joint, const int *joints) override |
| bool | getTargetPosition (int joint, double *ref) override |
| bool | getTargetPositions (double *refs) override |
| bool | getTargetPositions (int n_joint, const int *joints, double *refs) override |
| bool | setPosition (int j, double ref) override |
| bool | setPositions (const double *refs) override |
| bool | setPositions (int n_joint, const int *joints, const double *refs) override |
| bool | getRefPosition (int joint, double *ref) override |
| bool | getRefPositions (double *refs) override |
| bool | getRefPositions (int n_joint, const int *joints, double *refs) override |
| bool | setRefDutyCycle (int m, double ref) override |
| bool | setRefDutyCycles (const double *refs) override |
| bool | getRefDutyCycle (int m, double *ref) override |
| bool | getRefDutyCycles (double *refs) override |
| bool | getDutyCycle (int m, double *val) override |
| bool | getDutyCycles (double *vals) override |
| bool | getRemoteVariable (std::string key, yarp::os::Bottle &val) override |
| bool | setRemoteVariable (std::string key, const yarp::os::Bottle &val) override |
| bool | getRemoteVariablesList (yarp::os::Bottle *listOfKeys) override |
| bool | getRefTorque (int j, double *t) override |
| bool | getRefTorques (double *t) override |
| bool | setRefTorque (int j, double t) override |
| bool | setRefTorques (const double *t) override |
| bool | setRefTorques (int n_joint, const int *joints, const double *t) override |
| bool | getMotorTorqueParams (int j, yarp::dev::MotorTorqueParameters *params) override |
| bool | setMotorTorqueParams (int j, const yarp::dev::MotorTorqueParameters params) override |
| bool | getTorque (int j, double *t) override |
| bool | getTorques (double *t) override |
| bool | getTorqueRange (int j, double *min, double *max) override |
| bool | getTorqueRanges (double *min, double *max) override |
| bool | velocityMove (int j, double spd) override |
| bool | velocityMove (const double *spds) override |
| bool | velocityMove (int n_joint, const int *joints, const double *spds) override |
| bool | getRefVelocity (int joint, double *vel) override |
| bool | getRefVelocities (double *vels) override |
| bool | getRefVelocities (int n_joint, const int *joints, double *vels) override |
| std::size_t | getNrOfContactLoadCellArrays () const override |
| yarp::dev::MAS_status | getContactLoadCellArrayStatus (std::size_t sens_index) const override |
| bool | getContactLoadCellArrayName (std::size_t sens_index, std::string &name) const override |
| bool | getContactLoadCellArrayMeasure (std::size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| std::size_t | getContactLoadCellArraySize (std::size_t sens_index) const override |
| std::size_t | getNrOfEncoderArrays () const override |
| yarp::dev::MAS_status | getEncoderArrayStatus (std::size_t sens_index) const override |
| bool | getEncoderArrayName (std::size_t sens_index, std::string &name) const override |
| bool | getEncoderArrayMeasure (std::size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| std::size_t | getEncoderArraySize (std::size_t sens_index) const override |
| std::size_t | getNrOfOrientationSensors () const override |
| yarp::dev::MAS_status | getOrientationSensorStatus (std::size_t sens_index) const override |
| bool | getOrientationSensorName (std::size_t sens_index, std::string &name) const override |
| bool | getOrientationSensorFrameName (std::size_t sens_index, std::string &frameName) const override |
| bool | getOrientationSensorMeasureAsRollPitchYaw (std::size_t sens_index, yarp::sig::Vector &rpy, double ×tamp) const override |
| std::size_t | getNrOfPositionSensors () const override |
| yarp::dev::MAS_status | getPositionSensorStatus (std::size_t sens_index) const override |
| bool | getPositionSensorName (std::size_t sens_index, std::string &name) const override |
| bool | getPositionSensorFrameName (std::size_t sens_index, std::string &frameName) const override |
| bool | getPositionSensorMeasure (std::size_t sens_index, yarp::sig::Vector &xyz, double ×tamp) const override |
| std::size_t | getNrOfSixAxisForceTorqueSensors () const override |
| yarp::dev::MAS_status | getSixAxisForceTorqueSensorStatus (std::size_t sens_index) const override |
| bool | getSixAxisForceTorqueSensorName (std::size_t sens_index, std::string &name) const override |
| bool | getSixAxisForceTorqueSensorFrameName (std::size_t sens_index, std::string &frameName) const override |
| bool | getSixAxisForceTorqueSensorMeasure (std::size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| std::size_t | getNrOfSkinPatches () const override |
| yarp::dev::MAS_status | getSkinPatchStatus (std::size_t sens_index) const override |
| bool | getSkinPatchName (std::size_t sens_index, std::string &name) const override |
| bool | getSkinPatchMeasure (std::size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| std::size_t | getSkinPatchSize (std::size_t sens_index) const override |
| std::size_t | getNrOfTemperatureSensors () const override |
| yarp::dev::MAS_status | getTemperatureSensorStatus (std::size_t sens_index) const override |
| bool | getTemperatureSensorName (std::size_t sens_index, std::string &name) const override |
| bool | getTemperatureSensorFrameName (std::size_t sens_index, std::string &frameName) const override |
| bool | getTemperatureSensorMeasure (std::size_t sens_index, double &out, double ×tamp) const override |
| bool | getTemperatureSensorMeasure (std::size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| std::size_t | getNrOfThreeAxisGyroscopes () const override |
| yarp::dev::MAS_status | getThreeAxisGyroscopeStatus (std::size_t sens_index) const override |
| bool | getThreeAxisGyroscopeName (std::size_t sens_index, std::string &name) const override |
| bool | getThreeAxisGyroscopeFrameName (std::size_t sens_index, std::string &frameName) const override |
| bool | getThreeAxisGyroscopeMeasure (std::size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| std::size_t | getNrOfThreeAxisLinearAccelerometers () const override |
| yarp::dev::MAS_status | getThreeAxisLinearAccelerometerStatus (std::size_t sens_index) const override |
| bool | getThreeAxisLinearAccelerometerName (std::size_t sens_index, std::string &name) const override |
| bool | getThreeAxisLinearAccelerometerFrameName (std::size_t sens_index, std::string &frameName) const override |
| bool | getThreeAxisLinearAccelerometerMeasure (std::size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
| std::size_t | getNrOfThreeAxisMagnetometers () const override |
| yarp::dev::MAS_status | getThreeAxisMagnetometerStatus (std::size_t sens_index) const override |
| bool | getThreeAxisMagnetometerName (std::size_t sens_index, std::string &name) const override |
| bool | getThreeAxisMagnetometerFrameName (std::size_t sens_index, std::string &frameName) const override |
| bool | getThreeAxisMagnetometerMeasure (std::size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
 Public Member Functions inherited from CanBusBroker_ParamsParser Public Member Functions inherited from CanBusBroker_ParamsParser | |
| bool | parseParams (const yarp::os::Searchable &config) override |
| std::string | getDeviceClassName () const override |
| std::string | getDeviceName () const override |
| std::string | getDocumentationOfDeviceParams () const override |
| std::vector< std::string > | getListOfParams () const override |
| bool | getParamValue (const std::string ¶mName, std::string ¶mValue) const override |
| std::string | getConfiguration () const override |
Private Attributes | |
| roboticslab::DeviceMapper | deviceMapper |
| std::vector< yarp::dev::PolyDriver * > | busDevices |
| std::vector< yarp::dev::PolyDriver * > | nodeDevices |
| std::vector< roboticslab::SingleBusBroker * > | brokers |
| roboticslab::SyncPeriodicThread * | syncThread {nullptr} |
Additional Inherited Members | |
| Public Attributes inherited from CanBusBroker_ParamsParser | |
| const std::string | m_device_classname = {"CanBusBroker"} |
| const std::string | m_device_name = {"CanBusBroker"} |
| bool | m_parser_is_strict = false |
| const parser_version_type | m_parser_version = {} |
| std::string | m_provided_configuration |
| const std::string | m_buses_defaultValue = {""} |
| const std::string | m_syncPeriod_defaultValue = {"0.0"} |
| std::vector< std::string > | m_buses = {} |
| double | m_syncPeriod = {0.0} |
Detailed Description
This control board wrapper subdevice exposes motor commands to CAN nodes modelled as wrapped motor raw subdevices (i.e. devices which implement the xxxRaw interface counterparts). At the core of this driver class, another set of wrapped devices implements hardware connection to a physical CAN bus, thus allowing CAN reads and writes that CanBusBroker manages asynchronously with regard to exposed YARP commands (see CanReaderWriterThread).
This device also supports fake CAN buses and fake CAN nodes, see instructions.
The documentation for this class was generated from the following files:
- libraries/YarpPlugins/CanBusBroker/CanBusBroker.hpp
- libraries/YarpPlugins/CanBusBroker/DeviceDriverImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IAmplifierControlImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IAxisInfoImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IControlCalibrationImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IControlLimitsImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IControlModeImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/ICurrentControlImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IEncodersImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IImpedanceControlImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IInteractionModeImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IJointFaultImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IMotorEncodersImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IMotorImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IPidControlImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IPositionControlImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IPositionDirectImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IPWMControlImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IRemoteVariablesImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/ITorqueControlImpl.cpp
- libraries/YarpPlugins/CanBusBroker/motor/IVelocityControlImpl.cpp
- libraries/YarpPlugins/CanBusBroker/sensor/IContactLoadCellArraysImpl.cpp
- libraries/YarpPlugins/CanBusBroker/sensor/IEncoderArraysImpl.cpp
- libraries/YarpPlugins/CanBusBroker/sensor/IOrientationSensorsImpl.cpp
- libraries/YarpPlugins/CanBusBroker/sensor/IPositionSensorsImpl.cpp
- libraries/YarpPlugins/CanBusBroker/sensor/ISixAxisForceTorqueSensorsImpl.cpp
- libraries/YarpPlugins/CanBusBroker/sensor/ISkinPatchesImpl.cpp
- libraries/YarpPlugins/CanBusBroker/sensor/ITemperatureSensorsImpl.cpp
- libraries/YarpPlugins/CanBusBroker/sensor/IThreeAxisGyroscopesImpl.cpp
- libraries/YarpPlugins/CanBusBroker/sensor/IThreeAxisLinearAccelerometersImpl.cpp
- libraries/YarpPlugins/CanBusBroker/sensor/IThreeAxisMagnetometersImpl.cpp