Dummy implementation of a N-component sensor subdevice. More...
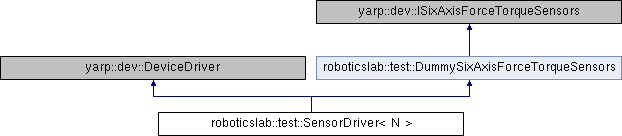
Inheritance diagram for roboticslab::test::SensorDriver< N >:
Public Member Functions | |
| std::size_t | getNrOfSixAxisForceTorqueSensors () const override |
| Retrieve the number of connected sensors. | |
 Public Member Functions inherited from roboticslab::test::DummySixAxisForceTorqueSensors Public Member Functions inherited from roboticslab::test::DummySixAxisForceTorqueSensors | |
| std::size_t | getNrOfSixAxisForceTorqueSensors () const override |
| yarp::dev::MAS_status | getSixAxisForceTorqueSensorStatus (std::size_t sens_index) const override |
| bool | getSixAxisForceTorqueSensorName (std::size_t sens_index, std::string &name) const override |
| bool | getSixAxisForceTorqueSensorFrameName (std::size_t sens_index, std::string &frameName) const override |
| bool | getSixAxisForceTorqueSensorMeasure (std::size_t sens_index, yarp::sig::Vector &out, double ×tamp) const override |
Static Public Member Functions | |
| static const std::string | name () |
| Generate a dummy name that identifies this device given the number of sensors. | |
Detailed Description
template<unsigned int N>
struct roboticslab::test::SensorDriver< N >
struct roboticslab::test::SensorDriver< N >
This device provides utilities that help create static instances of itself via YARP device registry, thus avoiding the need of prior installation and consequent lookup in order to use them.
- Template Parameters
-
N Number of connected sensors.
The documentation for this struct was generated from the following file:
- tests/testYarpDeviceMapperLib.cpp