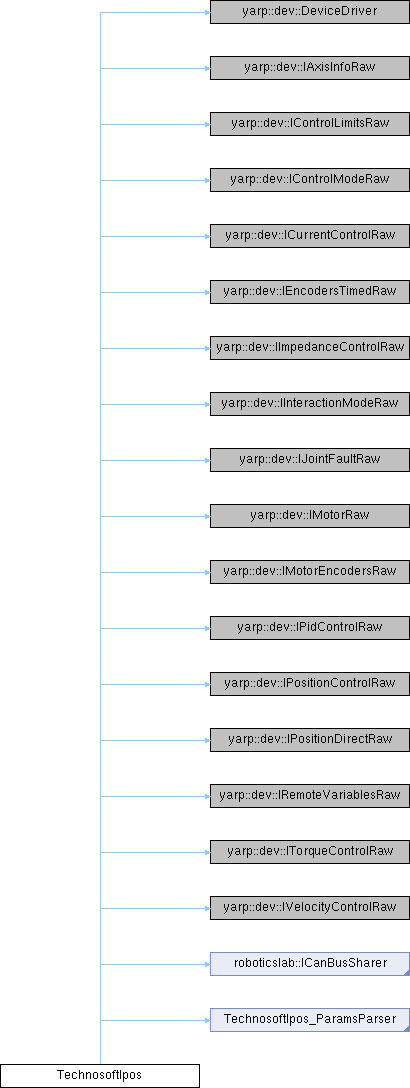
Implementation for the Technosoft iPOS as a single CAN bus joint (control board raw interfaces).
|
|
bool | open (yarp::os::Searchable &config) override |
| |
|
bool | close () override |
| |
|
std::string | id () const override |
| |
| unsigned int | getId () override |
| | Retrieve CAN node ID.
|
| |
| std::vector< unsigned int > | getAdditionalIds () override |
| | Retrieve more associated CAN node IDs, if any.
|
| |
| bool | notifyMessage (const roboticslab::can_message &message) override |
| | Notify observers that a new CAN message has arrived.
|
| |
| bool | initialize () override |
| | Perform CAN node initialization.
|
| |
| bool | finalize () override |
| | Finalize CAN node communications.
|
| |
| bool | registerSender (roboticslab::ICanSenderDelegate *sender) override |
| | Pass a handle to a CAN sender delegate instance.
|
| |
| bool | synchronize (double timestamp) override |
| | Perform synchronized action on CAN master's request.
|
| |
|
bool | getAxisNameRaw (int axis, std::string &name) override |
| |
|
bool | getJointTypeRaw (int axis, yarp::dev::JointTypeEnum &type) override |
| |
|
bool | setLimitsRaw (int axis, double min, double max) override |
| |
|
bool | getLimitsRaw (int axis, double *min, double *max) override |
| |
|
bool | setVelLimitsRaw (int axis, double min, double max) override |
| |
|
bool | getVelLimitsRaw (int axis, double *min, double *max) override |
| |
|
bool | getControlModeRaw (int j, int *mode) override |
| |
|
bool | getControlModesRaw (int *modes) override |
| |
|
bool | getControlModesRaw (int n_joint, const int *joints, int *modes) override |
| |
|
bool | setControlModeRaw (int j, int mode) override |
| |
|
bool | setControlModesRaw (int *modes) override |
| |
|
bool | setControlModesRaw (int n_joint, const int *joints, int *modes) override |
| |
|
bool | getCurrentRaw (int m, double *curr) override |
| |
|
bool | getCurrentsRaw (double *currs) override |
| |
|
bool | getCurrentRangeRaw (int m, double *min, double *max) override |
| |
|
bool | getCurrentRangesRaw (double *min, double *max) override |
| |
|
bool | setRefCurrentRaw (int m, double curr) override |
| |
|
bool | setRefCurrentsRaw (const double *currs) override |
| |
|
bool | setRefCurrentsRaw (int n_motor, const int *motors, const double *currs) override |
| |
|
bool | getRefCurrentRaw (int m, double *curr) override |
| |
|
bool | getRefCurrentsRaw (double *currs) override |
| |
|
bool | getAxes (int *ax) override |
| |
|
bool | resetEncoderRaw (int j) override |
| |
|
bool | resetEncodersRaw () override |
| |
|
bool | setEncoderRaw (int j, double val) override |
| |
|
bool | setEncodersRaw (const double *vals) override |
| |
|
bool | getEncoderRaw (int j, double *v) override |
| |
|
bool | getEncodersRaw (double *encs) override |
| |
|
bool | getEncoderSpeedRaw (int j, double *sp) override |
| |
|
bool | getEncoderSpeedsRaw (double *spds) override |
| |
|
bool | getEncoderAccelerationRaw (int j, double *spds) override |
| |
|
bool | getEncoderAccelerationsRaw (double *accs) override |
| |
|
bool | getEncoderTimedRaw (int j, double *encs, double *time) override |
| |
|
bool | getEncodersTimedRaw (double *encs, double *time) override |
| |
|
bool | getImpedanceRaw (int j, double *stiffness, double *damping) override |
| |
|
bool | setImpedanceRaw (int j, double stiffness, double damping) override |
| |
|
bool | setImpedanceOffsetRaw (int j, double offset) override |
| |
|
bool | getImpedanceOffsetRaw (int j, double *offset) override |
| |
|
bool | getCurrentImpedanceLimitRaw (int j, double *min_stiff, double *max_stiff, double *min_damp, double *max_damp) override |
| |
|
bool | getInteractionModeRaw (int axis, yarp::dev::InteractionModeEnum *mode) override |
| |
|
bool | getInteractionModesRaw (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| |
|
bool | getInteractionModesRaw (yarp::dev::InteractionModeEnum *modes) override |
| |
|
bool | setInteractionModeRaw (int axis, yarp::dev::InteractionModeEnum mode) override |
| |
|
bool | setInteractionModesRaw (int n_joints, int *joints, yarp::dev::InteractionModeEnum *modes) override |
| |
|
bool | setInteractionModesRaw (yarp::dev::InteractionModeEnum *modes) override |
| |
|
bool | getLastJointFaultRaw (int j, int &fault, std::string &message) override |
| |
|
bool | getNumberOfMotorsRaw (int *num) override |
| |
|
bool | getTemperatureRaw (int m, double *val) override |
| |
|
bool | getTemperaturesRaw (double *vals) override |
| |
|
bool | getTemperatureLimitRaw (int m, double *temp) override |
| |
|
bool | setTemperatureLimitRaw (int m, double temp) override |
| |
|
bool | getGearboxRatioRaw (int m, double *val) override |
| |
|
bool | setGearboxRatioRaw (int m, double val) override |
| |
|
bool | getNumberOfMotorEncodersRaw (int *num) override |
| |
|
bool | resetMotorEncoderRaw (int m) override |
| |
|
bool | resetMotorEncodersRaw () override |
| |
|
bool | setMotorEncoderCountsPerRevolutionRaw (int m, double cpr) override |
| |
|
bool | getMotorEncoderCountsPerRevolutionRaw (int m, double *cpr) override |
| |
|
bool | setMotorEncoderRaw (int m, double val) override |
| |
|
bool | setMotorEncodersRaw (const double *vals) override |
| |
|
bool | getMotorEncoderRaw (int m, double *v) override |
| |
|
bool | getMotorEncodersRaw (double *encs) override |
| |
|
bool | getMotorEncoderTimedRaw (int m, double *encs, double *stamp) override |
| |
|
bool | getMotorEncodersTimedRaw (double *encs, double *stamps) override |
| |
|
bool | getMotorEncoderSpeedRaw (int m, double *sp) override |
| |
|
bool | getMotorEncoderSpeedsRaw (double *spds) override |
| |
|
bool | getMotorEncoderAccelerationRaw (int m, double *spds) override |
| |
|
bool | getMotorEncoderAccelerationsRaw (double *vaccs) override |
| |
|
bool | setPidRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, const yarp::dev::Pid &pid) override |
| |
|
bool | setPidsRaw (const yarp::dev::PidControlTypeEnum &pidtype, const yarp::dev::Pid *pids) override |
| |
|
bool | setPidReferenceRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, double ref) override |
| |
|
bool | setPidReferencesRaw (const yarp::dev::PidControlTypeEnum &pidtype, const double *refs) override |
| |
|
bool | setPidErrorLimitRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, double limit) override |
| |
|
bool | setPidErrorLimitsRaw (const yarp::dev::PidControlTypeEnum &pidtype, const double *limits) override |
| |
|
bool | getPidErrorRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *err) override |
| |
|
bool | getPidErrorsRaw (const yarp::dev::PidControlTypeEnum &pidtype, double *errs) override |
| |
|
bool | getPidOutputRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *out) override |
| |
|
bool | getPidOutputsRaw (const yarp::dev::PidControlTypeEnum &pidtype, double *outs) override |
| |
|
bool | getPidRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, yarp::dev::Pid *pid) override |
| |
|
bool | getPidsRaw (const yarp::dev::PidControlTypeEnum &pidtype, yarp::dev::Pid *pids) override |
| |
|
bool | getPidReferenceRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *ref) override |
| |
|
bool | getPidReferencesRaw (const yarp::dev::PidControlTypeEnum &pidtype, double *refs) override |
| |
|
bool | getPidErrorLimitRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, double *limit) override |
| |
|
bool | getPidErrorLimitsRaw (const yarp::dev::PidControlTypeEnum &pidtype, double *limits) override |
| |
|
bool | resetPidRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| |
|
bool | disablePidRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| |
|
bool | enablePidRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j) override |
| |
|
bool | setPidOffsetRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, double v) override |
| |
|
bool | isPidEnabledRaw (const yarp::dev::PidControlTypeEnum &pidtype, int j, bool *enabled) override |
| |
|
bool | positionMoveRaw (int j, double ref) override |
| |
|
bool | positionMoveRaw (const double *refs) override |
| |
|
bool | positionMoveRaw (int n_joint, const int *joints, const double *refs) override |
| |
|
bool | relativeMoveRaw (int j, double delta) override |
| |
|
bool | relativeMoveRaw (const double *deltas) override |
| |
|
bool | relativeMoveRaw (int n_joint, const int *joints, const double *deltas) override |
| |
|
bool | checkMotionDoneRaw (int j, bool *flag) override |
| |
|
bool | checkMotionDoneRaw (bool *flag) override |
| |
|
bool | checkMotionDoneRaw (int n_joint, const int *joints, bool *flag) override |
| |
|
bool | setRefSpeedRaw (int j, double sp) override |
| |
|
bool | setRefSpeedsRaw (const double *spds) override |
| |
|
bool | setRefSpeedsRaw (int n_joint, const int *joints, const double *spds) override |
| |
|
bool | setRefAccelerationRaw (int j, double acc) override |
| |
|
bool | setRefAccelerationsRaw (const double *accs) override |
| |
|
bool | setRefAccelerationsRaw (int n_joint, const int *joints, const double *accs) override |
| |
|
bool | getRefSpeedRaw (int j, double *ref) override |
| |
|
bool | getRefSpeedsRaw (double *spds) override |
| |
|
bool | getRefSpeedsRaw (int n_joint, const int *joints, double *spds) override |
| |
|
bool | getRefAccelerationRaw (int j, double *acc) override |
| |
|
bool | getRefAccelerationsRaw (double *accs) override |
| |
|
bool | getRefAccelerationsRaw (int n_joint, const int *joints, double *accs) override |
| |
|
bool | stopRaw (int j) override |
| |
|
bool | stopRaw () override |
| |
|
bool | stopRaw (int n_joint, const int *joints) override |
| |
|
bool | getTargetPositionRaw (int joint, double *ref) override |
| |
|
bool | getTargetPositionsRaw (double *refs) override |
| |
|
bool | getTargetPositionsRaw (int n_joint, const int *joints, double *refs) override |
| |
|
bool | setPositionRaw (int j, double ref) override |
| |
|
bool | setPositionsRaw (const double *refs) override |
| |
|
bool | setPositionsRaw (int n_joint, const int *joints, const double *refs) override |
| |
|
bool | getRefPositionRaw (int joint, double *ref) override |
| |
|
bool | getRefPositionsRaw (double *refs) override |
| |
|
bool | getRefPositionsRaw (int n_joint, const int *joints, double *refs) override |
| |
|
bool | getRemoteVariableRaw (std::string key, yarp::os::Bottle &val) override |
| |
|
bool | setRemoteVariableRaw (std::string key, const yarp::os::Bottle &val) override |
| |
|
bool | getRemoteVariablesListRaw (yarp::os::Bottle *listOfKeys) override |
| |
|
bool | getRefTorqueRaw (int j, double *t) override |
| |
|
bool | getRefTorquesRaw (double *t) override |
| |
|
bool | setRefTorqueRaw (int j, double t) override |
| |
|
bool | setRefTorquesRaw (int n_joint, const int *joints, const double *t) override |
| |
|
bool | setRefTorquesRaw (const double *t) override |
| |
|
bool | getTorqueRaw (int j, double *t) override |
| |
|
bool | getTorquesRaw (double *t) override |
| |
|
bool | getTorqueRangeRaw (int j, double *min, double *max) override |
| |
|
bool | getTorqueRangesRaw (double *min, double *max) override |
| |
|
bool | getMotorTorqueParamsRaw (int j, yarp::dev::MotorTorqueParameters *params) override |
| |
|
bool | setMotorTorqueParamsRaw (int j, const yarp::dev::MotorTorqueParameters params) override |
| |
|
bool | velocityMoveRaw (int j, double sp) override |
| |
|
bool | velocityMoveRaw (const double *sp) override |
| |
|
bool | velocityMoveRaw (int n_joint, const int *joints, const double *spds) override |
| |
|
bool | getRefVelocityRaw (int joint, double *vel) override |
| |
|
bool | getRefVelocitiesRaw (double *vels) override |
| |
|
bool | getRefVelocitiesRaw (int n_joint, const int *joints, double *vels) override |
| |
|
virtual | ~ICanBusSharer ()=default |
| | Destructor.
|
| |
|
virtual | ~ICanMessageNotifier ()=default |
| | Virtual destructor.
|
| |
|
bool | parseParams (const yarp::os::Searchable &config) override |
| |
|
std::string | getDeviceClassName () const override |
| |
|
std::string | getDeviceName () const override |
| |
|
std::string | getDocumentationOfDeviceParams () const override |
| |
|
std::vector< std::string > | getListOfParams () const override |
| |
|
bool | getParamValue (const std::string ¶mName, std::string ¶mValue) const override |
| |
|
std::string | getConfiguration () const override |
| |
|
|
const std::string | m_device_classname = {"TechnosoftIpos"} |
| |
|
const std::string | m_device_name = {"TechnosoftIpos"} |
| |
|
bool | m_parser_is_strict = false |
| |
|
const parser_version_type | m_parser_version = {} |
| |
|
std::string | m_provided_configuration |
| |
|
const std::string | m_canId_defaultValue = {""} |
| |
|
const std::string | m_useEmbeddedPid_defaultValue = {"true"} |
| |
|
const std::string | m_name_defaultValue = {""} |
| |
|
const std::string | m_type_defaultValue = {""} |
| |
|
const std::string | m_max_defaultValue = {""} |
| |
|
const std::string | m_min_defaultValue = {""} |
| |
|
const std::string | m_maxVel_defaultValue = {""} |
| |
|
const std::string | m_refSpeed_defaultValue = {""} |
| |
|
const std::string | m_refAcceleration_defaultValue = {""} |
| |
|
const std::string | m_extraTr_defaultValue = {"1.0"} |
| |
|
const std::string | m_samplingPeriod_defaultValue = {""} |
| |
|
const std::string | m_reverse_defaultValue = {""} |
| |
|
const std::string | m_heartbeatPeriod_defaultValue = {""} |
| |
|
const std::string | m_syncPeriod_defaultValue = {""} |
| |
|
const std::string | m_initialControlMode_defaultValue = {"idl"} |
| |
|
const std::string | m_sdoTimeout_defaultValue = {"0.02"} |
| |
|
const std::string | m_driveStateTimeout_defaultValue = {"2.0"} |
| |
|
const std::string | m_tpdo1InhibitTime_defaultValue = {"0.0"} |
| |
|
const std::string | m_tpdo1EventTimer_defaultValue = {"0.0"} |
| |
|
const std::string | m_tpdo2InhibitTime_defaultValue = {"0.0"} |
| |
|
const std::string | m_tpdo2EventTimer_defaultValue = {"0.0"} |
| |
|
const std::string | m_monitorPeriod_defaultValue = {"0.0"} |
| |
|
const std::string | m_driver_peakCurrent_defaultValue = {""} |
| |
|
const std::string | m_motor_k_defaultValue = {""} |
| |
|
const std::string | m_gearbox_tr_defaultValue = {""} |
| |
|
const std::string | m_encoder_encoderPulses_defaultValue = {""} |
| |
|
const std::string | m_ipMode_defaultValue = {"pt"} |
| |
|
const std::string | m_ipPeriodMs_defaultValue = {"50"} |
| |
|
const std::string | m_enableIp_defaultValue = {"false"} |
| |
|
const std::string | m_enableCsv_defaultValue = {"false"} |
| |
|
const std::string | m_initialInteractionMode_defaultValue = {"unkn"} |
| |
|
const std::string | m_stiffness_defaultValue = {"0.0"} |
| |
|
const std::string | m_damping_defaultValue = {"0.0"} |
| |
|
const std::string | m_impedanceOffset_defaultValue = {"0.0"} |
| |
|
const std::string | m_minStiffness_defaultValue = {"0.0"} |
| |
|
const std::string | m_maxStiffness_defaultValue = {"0.0"} |
| |
|
const std::string | m_minDamping_defaultValue = {"0.0"} |
| |
|
const std::string | m_maxDamping_defaultValue = {"0.0"} |
| |
|
const std::string | m_kp_defaultValue = {"0.0"} |
| |
|
const std::string | m_ki_defaultValue = {"0.0"} |
| |
|
const std::string | m_kd_defaultValue = {"0.0"} |
| |
|
const std::string | m_maxInt_defaultValue = {"0.0"} |
| |
|
const std::string | m_maxOutput_defaultValue = {"0.0"} |
| |
|
const std::string | m_offset_defaultValue = {"0.0"} |
| |
|
const std::string | m_scale_defaultValue = {"1.0"} |
| |
|
const std::string | m_stictionUp_defaultValue = {"0.0"} |
| |
|
const std::string | m_stictionDown_defaultValue = {"0.0"} |
| |
|
const std::string | m_kff_defaultValue = {"0.0"} |
| |
|
const std::string | m_errorLimit_defaultValue = {"0.0"} |
| |
|
int | m_canId = {0} |
| |
|
bool | m_useEmbeddedPid = {true} |
| |
|
std::string | m_name = {} |
| |
|
std::string | m_type = {} |
| |
|
double | m_max = {std::nan("1")} |
| |
|
double | m_min = {std::nan("1")} |
| |
|
double | m_maxVel = {std::nan("1")} |
| |
|
double | m_refSpeed = {std::nan("1")} |
| |
|
double | m_refAcceleration = {std::nan("1")} |
| |
|
double | m_extraTr = {1.0} |
| |
|
double | m_samplingPeriod = {std::nan("1")} |
| |
|
bool | m_reverse = {false} |
| |
|
double | m_heartbeatPeriod = {std::nan("1")} |
| |
|
double | m_syncPeriod = {std::nan("1")} |
| |
|
std::string | m_initialControlMode = {"idl"} |
| |
|
double | m_sdoTimeout = {0.02} |
| |
|
double | m_driveStateTimeout = {2.0} |
| |
|
double | m_tpdo1InhibitTime = {0.0} |
| |
|
double | m_tpdo1EventTimer = {0.0} |
| |
|
double | m_tpdo2InhibitTime = {0.0} |
| |
|
double | m_tpdo2EventTimer = {0.0} |
| |
|
double | m_monitorPeriod = {0.0} |
| |
|
double | m_driver_peakCurrent = {std::nan("1")} |
| |
|
double | m_motor_k = {std::nan("1")} |
| |
|
double | m_gearbox_tr = {std::nan("1")} |
| |
|
double | m_encoder_encoderPulses = {std::nan("1")} |
| |
|
std::string | m_ipMode = {"pt"} |
| |
|
int | m_ipPeriodMs = {50} |
| |
|
bool | m_enableIp = {false} |
| |
|
bool | m_enableCsv = {false} |
| |
|
std::string | m_initialInteractionMode = {"unkn"} |
| |
|
double | m_stiffness = {0.0} |
| |
|
double | m_damping = {0.0} |
| |
|
double | m_impedanceOffset = {0.0} |
| |
|
double | m_minStiffness = {0.0} |
| |
|
double | m_maxStiffness = {0.0} |
| |
|
double | m_minDamping = {0.0} |
| |
|
double | m_maxDamping = {0.0} |
| |
|
double | m_kp = {0.0} |
| |
|
double | m_ki = {0.0} |
| |
|
double | m_kd = {0.0} |
| |
|
double | m_maxInt = {0.0} |
| |
|
double | m_maxOutput = {0.0} |
| |
|
double | m_offset = {0.0} |
| |
|
double | m_scale = {1.0} |
| |
|
double | m_stictionUp = {0.0} |
| |
|
double | m_stictionDown = {0.0} |
| |
|
double | m_kff = {0.0} |
| |
|
double | m_errorLimit = {0.0} |
| |
 Public Member Functions inherited from roboticslab::ICanBusSharer
Public Member Functions inherited from roboticslab::ICanBusSharer