Tutorial: Force/Torque Sensors#
Requires at least YARP 3.4. First, activate the teoSim Force/Torque Sensors: In the YARP application manager instance, navigate through Applications > teoSimBase_App > right-click on the openraveYarpPluginLoaderClient corresponding to multipleanalogsensorsserver > Run
Via GUIs#
To view the force/torque signals, perform the sequence:
- In the YARP application manager instance, navigate through
Applications>teoSimTools_App> right-click on the correspondingyarpscope>Run - In the YARP application manager instance, navigate through
Applications>teoSimTools_App> right-click on the corresponding (bottom frame) connection >Connect
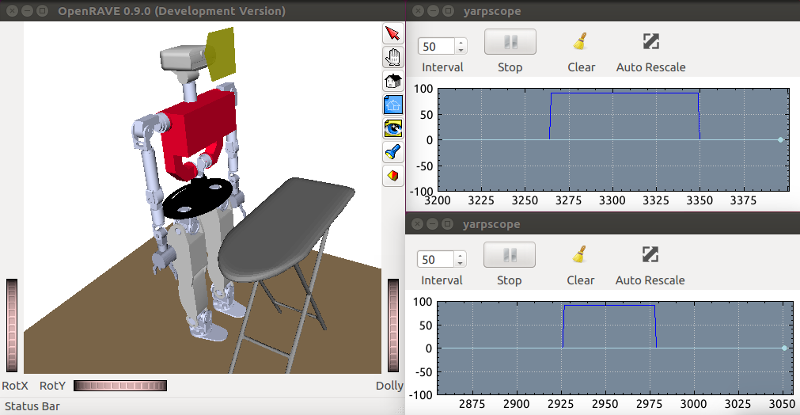
Activate physics and move joints in teoSim, and you should get results similar to the figure below.
Via APIs#
The preferred approach, using the APIs provided by YARP within our programs and scripts.
- APIs
- yarp::dev::ISixAxisForceTorqueSensors
- Implementation in simulator