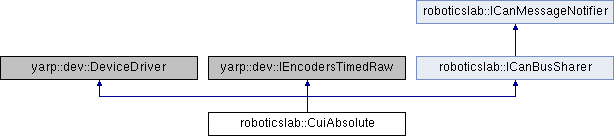
Implementation for the Cui Absolute Encoder custom UC3M circuit as a single CAN bus joint (control board raw interfaces).
#include <CuiAbsolute.hpp>
|
|
bool | open (yarp::os::Searchable &config) override |
| |
|
bool | close () override |
| |
| unsigned int | getId () override |
| | Retrieve CAN node ID.
|
| |
| bool | notifyMessage (const can_message &message) override |
| | Notify observers that a new CAN message has arrived.
|
| |
| bool | initialize () override |
| | Perform CAN node initialization.
|
| |
| bool | finalize () override |
| | Finalize CAN node communications.
|
| |
| bool | registerSender (ICanSenderDelegate *sender) override |
| | Pass a handle to a CAN sender delegate instance.
|
| |
| bool | synchronize (double timestamp) override |
| | Perform synchronized action on CAN master's request.
|
| |
|
bool | getAxes (int *ax) override |
| |
|
bool | resetEncoderRaw (int j) override |
| |
|
bool | resetEncodersRaw () override |
| |
|
bool | setEncoderRaw (int j, double val) override |
| |
|
bool | setEncodersRaw (const double *vals) override |
| |
|
bool | getEncoderRaw (int j, double *v) override |
| |
|
bool | getEncodersRaw (double *encs) override |
| |
|
bool | getEncoderSpeedRaw (int j, double *sp) override |
| |
|
bool | getEncoderSpeedsRaw (double *spds) override |
| |
|
bool | getEncoderAccelerationRaw (int j, double *spds) override |
| |
|
bool | getEncoderAccelerationsRaw (double *accs) override |
| |
|
bool | getEncodersTimedRaw (double *encs, double *time) override |
| |
|
bool | getEncoderTimedRaw (int j, double *encs, double *time) override |
| |
|
virtual | ~ICanBusSharer ()=default |
| | Destructor.
|
| |
| virtual std::vector< unsigned int > | getAdditionalIds () |
| | Retrieve more associated CAN node IDs, if any.
|
| |
|
virtual | ~ICanMessageNotifier ()=default |
| | Virtual destructor.
|
| |
|
| enum class | CuiMode { PUSH
, PULL
, OFF
} |
| |
| enum class | CuiCommand : std::uint8_t { PUSH_START = 1
, PUSH_STOP = 2
, POLL = 3
} |
| |
|
using | encoder_t = yarp::conf::float32_t |
| |
|
|
bool | performRequest (const std::string &name, unsigned int len, const std::uint8_t *msgData, encoder_t *resp=nullptr) |
| |
|
bool | startPushMode () |
| |
|
bool | stopPushMode () |
| |
|
bool | pollEncoderRead (encoder_t *enc) |
| |
|
void | normalize (encoder_t *v) |
| |
|
|
unsigned int | canId |
| |
|
double | timeout |
| |
|
int | maxRetries |
| |
|
int | retry |
| |
|
bool | reverse |
| |
|
CuiMode | cuiMode |
| |
|
std::uint8_t | pushDelay |
| |
|
encoder_t | encoder |
| |
|
double | encoderTimestamp |
| |
|
ICanSenderDelegate * | sender |
| |
|
StateObserver * | pushStateObserver |
| |
|
TypedStateObserver< encoder_t > * | pollStateObserver |
| |
|
std::mutex | mutex |
| |
◆ finalize()
| bool CuiAbsolute::finalize |
( |
| ) |
|
|
overridevirtual |
◆ getId()
| unsigned int CuiAbsolute::getId |
( |
| ) |
|
|
overridevirtual |
◆ initialize()
| bool CuiAbsolute::initialize |
( |
| ) |
|
|
overridevirtual |
◆ notifyMessage()
| bool CuiAbsolute::notifyMessage |
( |
const can_message & |
msg | ) |
|
|
overridevirtual |
◆ registerSender()
◆ synchronize()
| bool CuiAbsolute::synchronize |
( |
double |
timestamp | ) |
|
|
overridevirtual |
The documentation for this class was generated from the following files:
- libraries/YarpPlugins/CuiAbsolute/CuiAbsolute.hpp
- libraries/YarpPlugins/CuiAbsolute/CuiAbsolute.cpp
- libraries/YarpPlugins/CuiAbsolute/DeviceDriverImpl.cpp
- libraries/YarpPlugins/CuiAbsolute/ICanBusSharerImpl.cpp
- libraries/YarpPlugins/CuiAbsolute/IEncodersRawImpl.cpp
 Public Member Functions inherited from roboticslab::ICanBusSharer
Public Member Functions inherited from roboticslab::ICanBusSharer